Blender でリバースフットリグを組む
目次
概要
リバースフットリグは脚を IK で操作しているときにつま先立ちができるようにするリグだ。
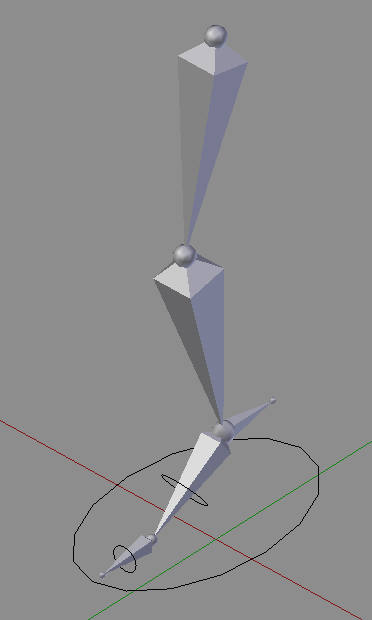
通常の足のボーン構造はルートからつま先へ向かう。このボーン構造では爪先立ちが作りづらい。そこで足のボーンの向きを反転することで、IK 時につま先立ちが作れるようになる。
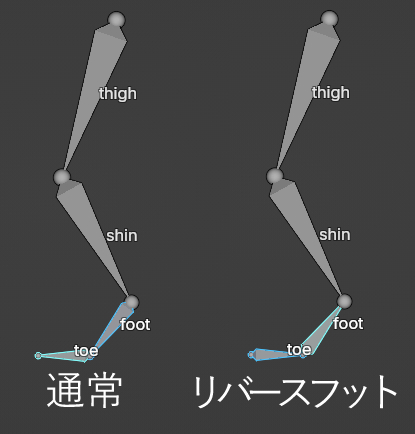
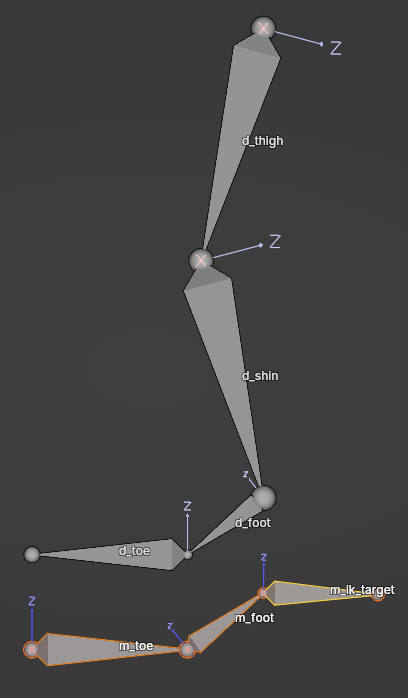
左:通常のボーン構造
右:足のボーンが逆向きになっている
足の回転軸となるボーンの親子構造がデフォーム用ボーンのそれと逆向きになっていることから、このリグ Reverse Foot Rig と呼ばれる。
FK が不要な場合はこの構造のままウェイトをつけられる。FK が必要な場合は、IKFK 切り替えスイッチを使うか、IK 後に FK で調整できるリグを使う。
ウェイトを付けたボーンを変更せず、FK も必要な場合は FK ボーンの上にリグを組み、IKFK 切り替えスイッチを追加する。
IK のみ必要な場合
リバースフットリグ用の制御ボーンの先に IK ターゲットを配置する。
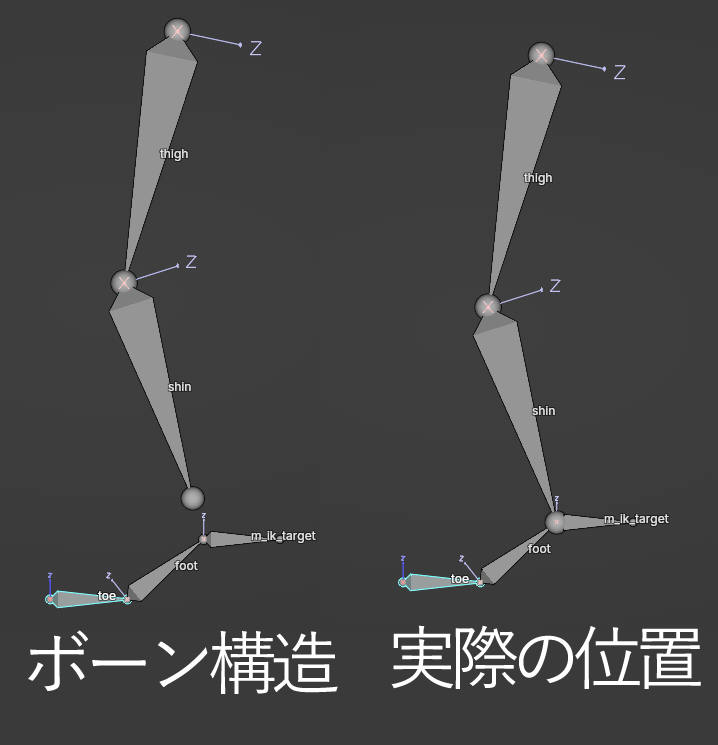
ボーン構造(左)と実際の位置(右)
基礎となるボーン構造
この状態でもつま先立ちはできる。しかしすでにデフォームボーンがあってそれにリグを追加しなければならなかったり、IK/FK の切り替えが必要な場合はこのまま使うわけにはいかない。
FK ボーン上にリグを組む場合
デフォーム用ボーン
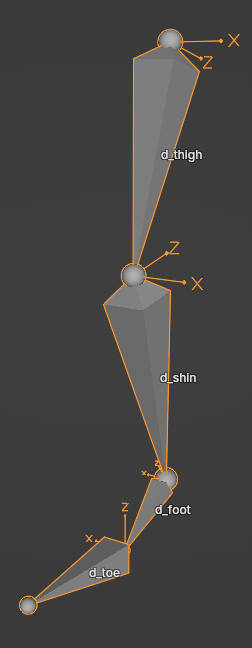
デフォーム用ボーンの配置
ここで重要なのは、d_foot と d_toe の Z 座標だ。Track to でボーンを動かすため、回転軸ボーンとデフォーム用ボーンの Z 軸の向きを一致させなければならない。ここではボーンの Z 軸を上に設定してある。ローカル座標軸の設定はボーンのローカル座標軸設定を参照。
リバースフットリグの制御ボーン
以下のようなボーンでリバースフットリグを制御する。実際は制御ボーンは重なっている。
説明用にボーン位置を変更している
実際の位置
IK の設定
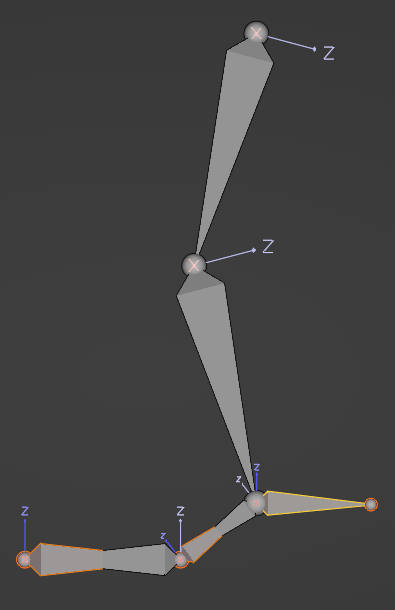
d_shin に IK を設定する。IK のターゲットは m_ik_target、 Chain length は 2。
ここまでの状況
Track To の設定
d_foot と d_toe とに Track To を設定する。d_foot のターゲットは m_foot、d_toe のターゲットは m_toe。設定はトラック軸を Y、上を Z。
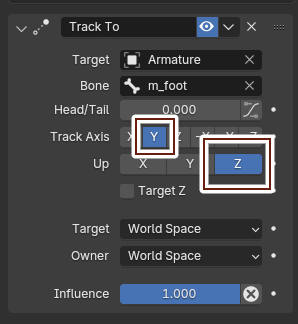
d_foot の設定。d_toe も同様に設定する
完成
このままではリグを選択しにくいのでコントローラー用ボーンを作成するか、カスタムシェイプを設定する。
カスタムシェイプを適用した状態
IK 後に FK で調整できるリグ
動作デモ
FK のボーン構造を保存する必要がない場合、デフォームボーンをリバースフットボーンの子にすることで IK 後に FK で調整できる。この方法は IK/FK スイッチを作るのが面倒な時に重宝する。
作り方は簡単で、足の FK ボーンを足の位置にあるリバースフットボーン親として親子付けする。
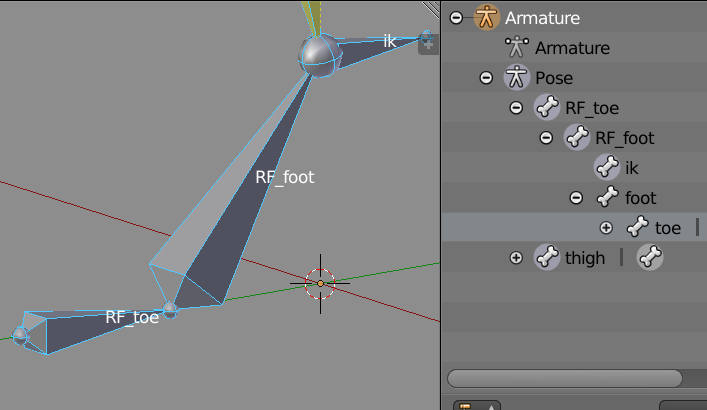
ボーン階層
つま先のボーンの「回転を継承」のチェックを外し、ワールドーワールドで回転コピーをつける。回転コピーにはオフセットにチェックを入れる。
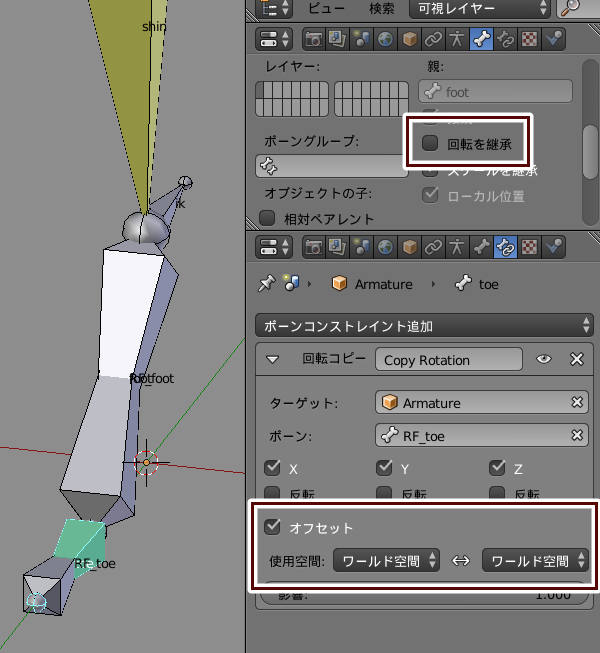
つま先 FK ボーンの設定
外部リンク
アニメーション練習用リグ 配布(Blender 簡易リバースフット付き)
足の甲の FK ボーンのないリバースフットリグ。構造が単純で理解しやすい。